Linear algebra is the language used to describe and manipulate the objects of analytical geometry. Every core concept in linear algebra, from vectors to eigenvectors, has a direct geometric interpretation.
The most fundamental connection is the vector. In analytical geometry, we describe a point with coordinates like $(x, y)$. In linear algebra, this is represented as a column vector. This vector can be seen as either the position of the point or as an arrow from the origin to that point, representing a direction and magnitude.
A matrix is a function that transforms geometric space. When you multiply a vector by a matrix, you are applying a transformation to that point.
Dynamic visualization of a linear transformation:
In analytical geometry, a line or a plane is a set of points satisfying an equation. In linear algebra, these are described as subspaces or the span of vectors.
An eigenvector of a matrix represents a direction that remains unchanged (except for scaling) during the transformation. In analytical geometry, this defines the principal axes of the transformation.
Imagine a stretching transformation. The eigenvectors are the directions along which the stretching occurs. A point on an eigenvector’s path will stay on that path; it will only move further from or closer to the origin.
The first visualization below shows a full-rank transformation — one that stretches and shears space without collapsing it. Notice how the grid, originally square, becomes a parallelogram, yet the entire plane remains intact. The eigenvectors mark the invariant directions of this transformation, each scaled by its corresponding eigenvalue.
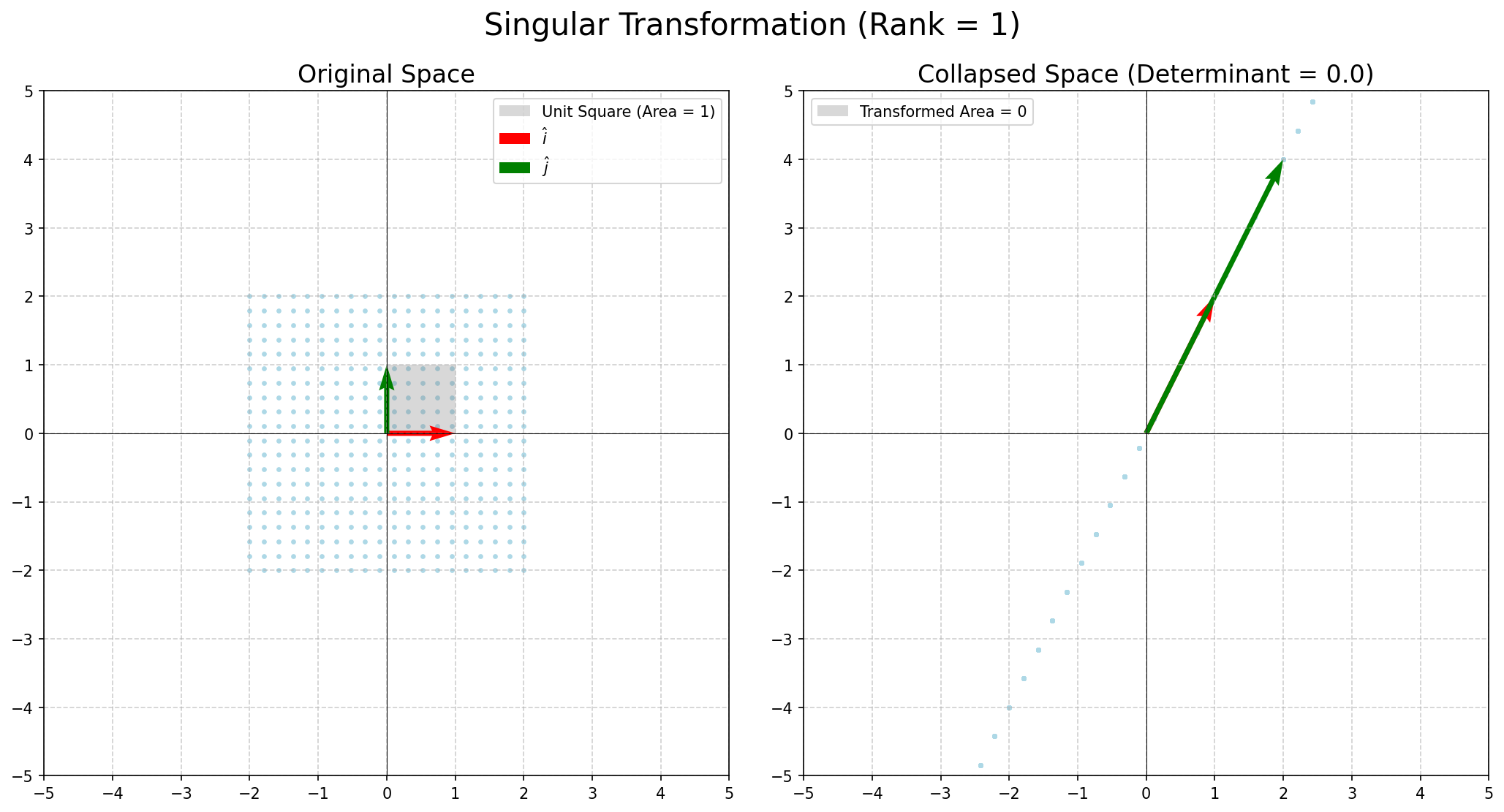
The determinant of a matrix has a direct geometric meaning: it’s the scaling factor of area (in 2D) or volume (in 3D) after the transformation.
In contrast, the second visualization shows a singular transformation. Here, the determinant equals zero, meaning all points are projected onto a single line. The grid collapses, and the transformed “area” vanishes. This demonstrates the geometric meaning of a singular matrix — a transformation that destroys one dimension of space.
Solving a system of linear equations is equivalent to finding the intersection of geometric objects.